【ロボット名鑑】産総研「自律走行車いす」シリーズなど
自律移動や安全機能などを備えたモビリティロボットたち

2011年06月02日からスタートした、つくばモビリティロボット実験特区での公道実験(記事はこちら)で、実験型の車両を最も多く持ち込んだのが、独立行政法人産業技術総合研究所(以下、産総研)だ。
産総研ではこれまで、つくばチャレンジ2010(記事はこちら)で完走タイム第3位の記録を残した「Marcus」や、産総研オープンラボ(記事はこちら)で3台でのタンデム走行の搭乗体験デモンストレーションを行った「追従走行車いす」など、複数のインテリジェントな「自律走行車いす」シリーズを開発している。既にこれらで実現している技術としては、「3次元地図をベースとした屋内外環境における長距離自律走行」、「人や障害物などを検知し衝突を回避するなどの安全機能」、「安定かつ乗り心地のよい追従制御」、「手動・自動(追従)モード間の円滑な移行」などだ。
産総研が今回の実証実験に参加する理由は、研究開発中のモビリティロボット関連技術の早期実用化を目指していることがある。屋外の人などが混在する環境における実験を通じて開発技術の検証を行い、さらには実用化に必要とされる技術を洗い出して今後の技術開発にフィードバックしていくという。今年度中に検証したい技術としては、「さまざまな市街地環境での自己位置認識技術」、「長距離自律走行技術(数km以上)」、「衝突、転落などの危険環境権値・回避技術」、「複数台モビリティの安定縦列走行と受容性検証」、「ほかモビリティとの通信を利用した安定追従走行」、「自律と追従走行車いすの新しいサービスの検討」の6つを挙げられている。
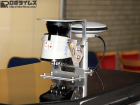
今回はMarcusや追従走行車いすなどが持ち込まれたが、初お披露目となった機体もあった。それが「全天候型自律走行車いす」だ。ベースはMarcusで、雨や雪などを避けるための天板をつけた形だ。その分若干ながら全高がアップしており、Marcusの全高1470mmに対し、10cm以上高いように見える(正確なサイズは未発表)。重量に関しては発表されており、Marcusよりも10kg重い60kgだ。原動機としては、出力が90WのDCサーボモータをふたつ搭載しているのは、Marcusなどと同じ。センサの種類も同じで、レーザーレンジファインダ、GPS、ロータリエンコーダなどを搭載している。最高時速もMarcusなどと同じで、時速6km/hだ。
「全天候型」とあるのは、操縦用のジョイスティックなどに防水機能が与えられているなど、機械自体が雨や雪に対する対策が施されている点もあるのだが、搭乗者が濡れずに済むという点も含められている。今回は写真撮影がしやすいようにと外されていたが、天板に雨天時用のビニールカーテンを取り付けられるようになっていて、搭乗者は雨の心配をせずに移動できるようになっているというわけだ。

また、今回は車いす型のほかにも立ち乗りの倒立振子平行2輪型の「マイクロモビリティ」も実験に参加した。先端技術館@TEPIAで2010年度に展示されていたので、拝見された方も多いかも知れないが、ステップ部分から搭乗者が捕まるためのスティック状のグリップが2本伸びており、車輪つき竹馬のようなイメージもある外見をしている。特徴は、「エアサスペンションによる乗り心地の向上」、「小型軽量(13kg)で市街地公道(歩道)走行に必要最小限の段差踏破性能(4cm)の実現」、「外界センサによる安全機能の搭載」の3つ。小型軽量でタイヤ径も小さいので人混みの中でもあまり周囲の歩行者に圧迫感などを与えずに移動でき、その一方でエアサスによって不整地での走行も可能、障害物がある場合はそれを検知して搭乗者に知らせるなどの機能を持っているというわけだ。
マイクロモビリティに関する今回の公道実験で検証しようとしている技術はふたつ。ひとつが「外界センサを活用した平行2輪型モビリティの安全技術(危険検知・回避)」で、もうひとつが「歩行者・自転車などの混在環境における安全性と利便性の検証、安全基準の検討」だ。